
A primeira versão do Projeto – Robô Paralelo foi elaborada para participar do Primeiro Desafio de Robôs organizado pelo Curso Técnico em Eletrônica do IFSUL – Campus Pelotas e que ocorreu no dia 29/11/2012 no saguão do nosso Instituto. O projeto trata da construção de um robô paralelo conhecido como Robô Delta (veja foto abaixo) por alunos do curso de Eletromecânica. Este trabalho foi apresentado no evento e classificado em primeiro lugar na categoria livre.

O sistema do robô foi deselvolvido pelos alunso do curso de Eletromecânica Henrique Gonçalves Andrade (3° Módulo), Madison Guidotti Sampaio (2° Módulo) e Patrick Azevedo de Avila (1° Módulo), pelos professores Cláudio Luís d’Elia Machado, Vladimir Afonso e José Carlos Hirdes. O grupo também contou com a colaboração do aluno Matheus Pilotto Figueiredo do curso de Engenharia Elétrica na parte de acionamento e controle.
Os alunos realizaram o projeto do robô em software de cad, a construção dos componentes mecânicos do robô, montagem e foram responsáveis pela confecção de placas eletrônicas do hardware do robô. O professor Vladimir foi o orientador da parte eletrônica, o professor Hirdes foi responsável pela orientação da usinagem e montagem e o professor Cláudio Machado pela orientação do projeto mecânico e elaboração dos programas de computador para acionamento do robô.
Com o sucesso alcançado, pode-se continuar o trabalho e desenvolver novos projetos usando o robô. Um projeto de final de curso da Engenharia Elétrica do IFSul – Campus Pelotas foi realizado com objetivo de aprimorar o controle do robô com novo hardware.
O aluno Fabiano Sandrini Moraes desenvolveu o modelamento cinemático do robô e um software de controle. O novo hardware foi utilizado para interface entre computador e motores de acionamento.
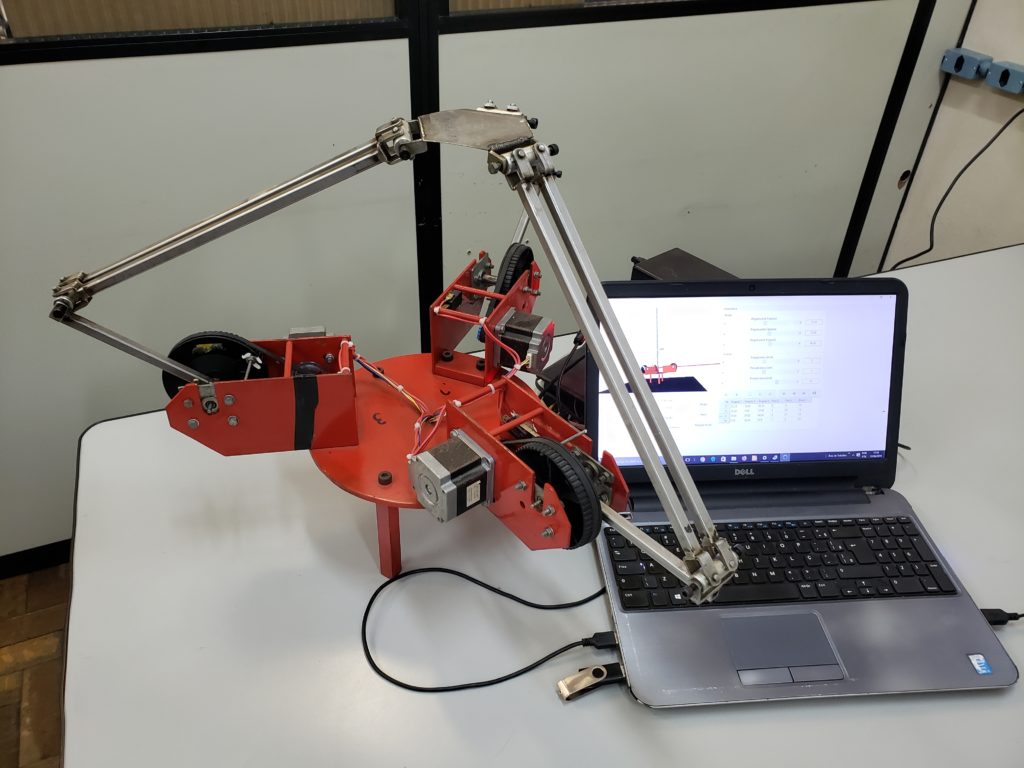
O vídeo ao lado, gravado durante apresentação do PFC de Engenharia Elétrica de Fabiano Sandrini, demonstra o funcionamento sincronizado com o modelo de controle em exibição na tela. S
O trabalho no Robo Paralelo segue sendo desenvolvido dentro do Grupo de Pesquisa em Automação e Controle (GPAC) e do Laborat´ório de Controle e Rob´ótica da Engenharia Elétrica (em processo de consolidação). A página de pesquisa do Curso apresenta algumas informações.
Uma página com informações do robo paralelo é mantida pelo professor Claudio Machado.
A página do GPAC está em contrsução mas algumas informações já podem ser encontrada nesse endereço.